

The NASTI : Processing
|
An Intel Core i3 processor receives input from all available sensors and makes decisions to complete challenges. Image processing and advanced LiDAR processing is performed here. It runs as a headless CrunchBang Linux server. 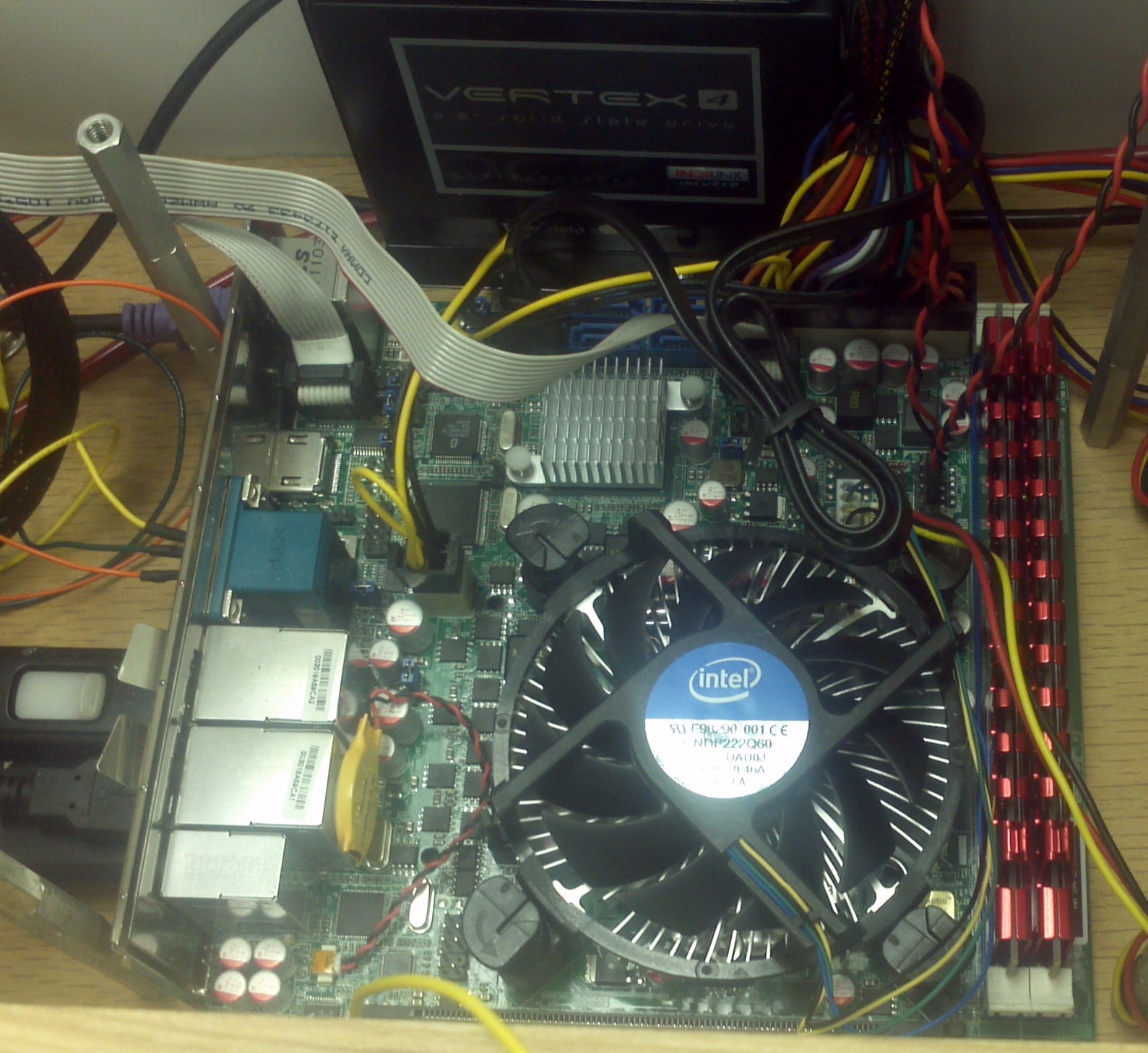 The secondary processor is used for safety, to separate the primary from the motors, and for interpreting RC signals. It is an 8-bit microcontroller. In autonomous mode, the secondary simply relays the primary processor's commands to the motor interface. If the RC override is activated, the secondary will adapt incoming RC commands into commands for the motor interface, and ignore the primary processor. If the RC killswitch has been actived, the secondary will trigger a relay which disconnects all electronics from the power source. The white board in the image is the secondary processor and supporting hardware. 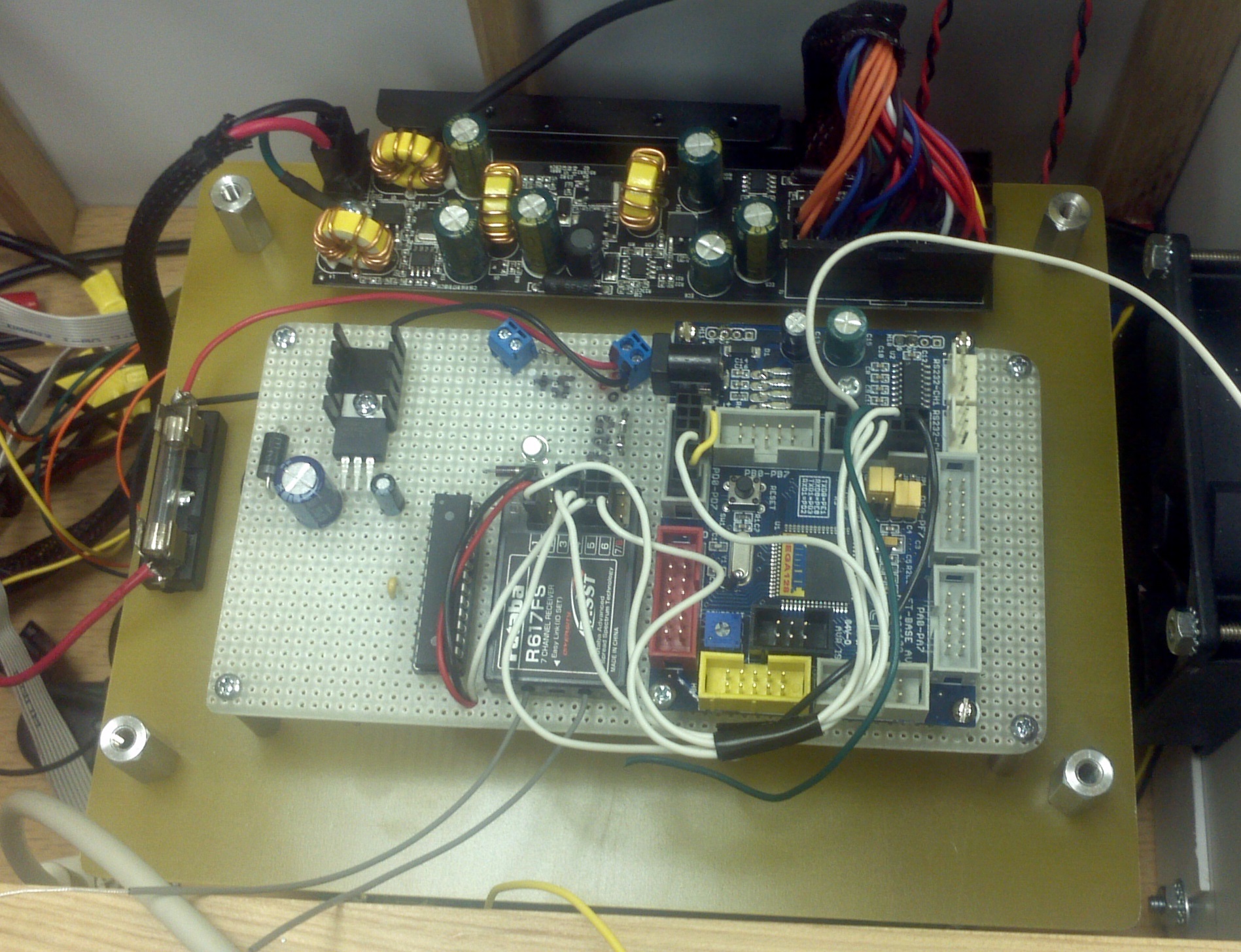 The LiDAR microcontroller processes the raw data stream from the LiDAR before sending it to the primary processor. This allows bad packets and extraneous data to be removed before the information is used to make decisions. An 8-bit microcontroller is used to do preliminary data processing for several sensors. It receives input from the GPS receiver, the compass, and the thermopile. It performs pre-processing of the data. It transmits data when requested by the primary processor. An 8-bit microcontroller interfaces with the secondary processor and the motors. It receives packets of motor commands and generates 6 PWM outputs, one for each motor. The box in the image below also contains relays, MOSFET's, BJT's, and power management circuitry to drive the motors. 
|