[Main] [Project Deliverables
] [Progress Log] [Methods/Research
] [References/Links]
Sensing Methods
The sensing method to be used is based on a passive levitation system using permanent magnets.
Each sensor will corrspond to an electromagnet that will push the train along. The spacing of the sensors
to be used will allow two electromagnets on at all times. The sensor that corresponds to each
electromagnet will be placed slightly less than one cart length down the track. This makes the electro-
magnet trigger in the correct position to push the train along. The configuration of sensors and electro-
magnets are shown in figure 1.
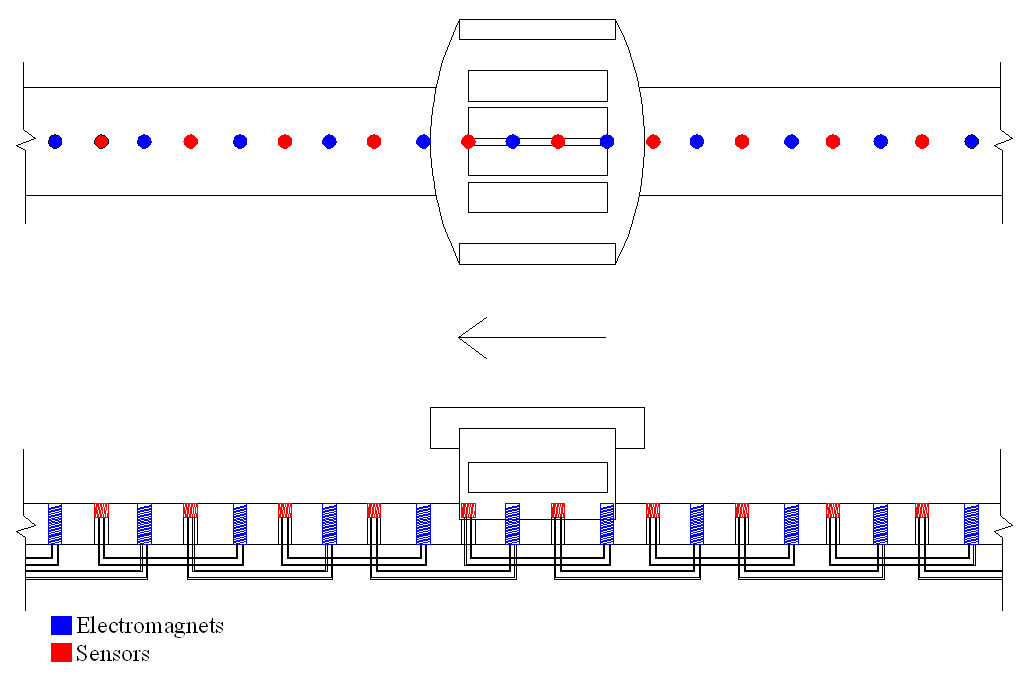
Figure 1 - Sensing Method for Train Position
The method of sensing can be either optical or magnetic. Magnetic sensing is going to be used. The sensor
shown in figure 2 illustrates the use of a coil of wire as the sensor. When the train passes over the coil, a current
will be induced creating a voltage across the resistor. The problem with this sensing method is that the train must
be moving in order to determine its position. The correct magnets to propel the train when stopped could not be
determined using this method.
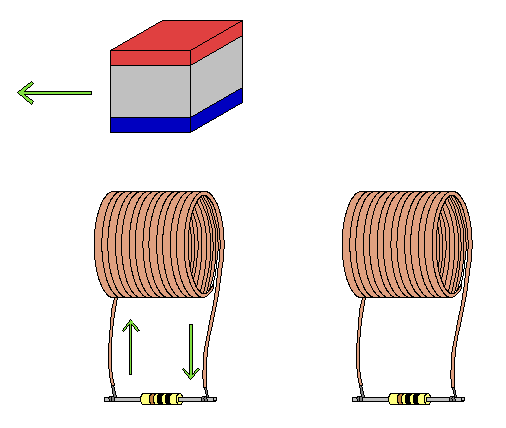
Figure 2 - Inductive Train Sensor
The mechanical sensing method shown in figure 3 uses a conductive ball, such as a ball bearing, as the switch.
When the train passes over the sensor, the ball will lift up, and stop the flow of current by creating an open circuit.
When the train is not present, the sensor completes the current path.
Figure 3 - Mechanical Train Sensor
Copyright © 2003 Bradley University, Department of Electrical and Computer Engineering. All rights reserved.