[Main] [Project Deliverables ] [Progress Log] [Methods/Research ] [References/Links]
Propulsion can be implemented by the use of two main methods, a linear synchronous motor (LSM), and a linear induction motor (LIM).
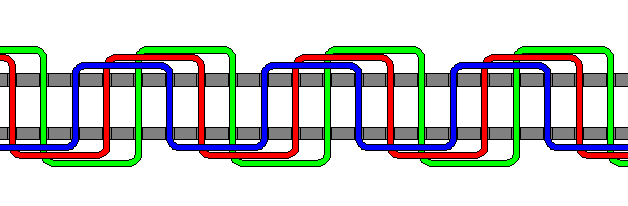
The Low-Speed Urban Maglev Program is using the LSM method for propulsion and transverse guidance. This option was chosen due to the large air gap of 25 mm. An LSM is also cheaper for situations where more train cars are on the track. The use of an LSM creates a guidance force, and increases the passive levitation force. Three-phase windings of solid copper cables along laminated iron rails are placed along the track [12]. The three-phase windings being used are shown in figure 16.
LSM propulsion controls the velocity of the train by varying frequencies. If improper control is used, the train will vibrate above the LSM due to “slip.” The LSM method may be used for the Magnetic Levitation Technology 1, Sr. Project.
An LIM can be used to levitate a system. LIM’s have conventionally been used by placing electromagnets inside the train portion of the system. The track is typically made of an aluminum ladder. When the train passes over a wrung of the ladder, an electromagnet turns on, inducing a repulsive force in the track. This can both levitate, and propel the train. The same concept can be used by placing the electromagnets in the track. An illustration of this is shown in figure 17.
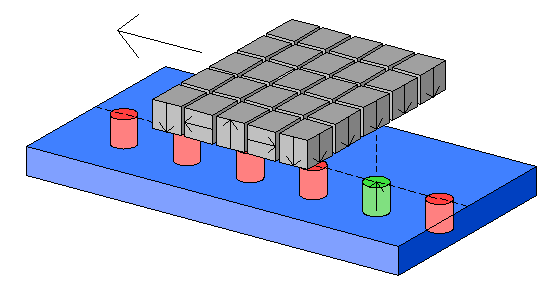
A modified form of the LIM can be used to “tap” the train to propel it. This method would use the strong magnetic field present due to the levitation Halbach arrays. Electromagnets are evenly spaced along the track. A DC current is placed through the electromagnet when the back of the train is directly above it. The electromagnet is oriented so it will repel the Halbach array when turned on. When the back of the train passes over the next electromagnet the previous electromagnet turns off, and the next electro magnet turns on. The acceleration, and velocity can be controlled by the level of current, or duty cycle allowed into each electromagnet. An illustration of the modified LIM is shown in figure 18.
Both the LSM and the LIM propulsion method will require high power circuitry.