Initial design meeting - discussion of system function. Decision was made to play "Ghost in the Graveyard." Also, decisions were made as to the overall system design. We are interested in running the webserver off an embedded processor on each robot. With these initial decisions made investigation into the robotic platform began.
Continued research on robotic platform decision. Reviewed system block diagram and functional description with advisors.
A platform has been identified which looks like it will suit our purposes. It is the Pioneer 2 DX manufactured by Activemedia Robotics. This platform appears to suit our needs for this application, however there are a few technical matters that we are addressing with Activmedia themselves.
Still working with Activmedia to get all of our questions answered. Also, Dr. Malinowski informed us about the Netmeeting Software Development Kit, which may help us transfer our video stream to the user.
This week we are making final hardware decisions so that the required equipment will be here in time for the project construction next semester.
This is our first week back for second semester. Our Pioneer 2-DX robot and Sony VAIO laptop have arrived. Today we spent most of our time getting familiar with the robot and control software that was provided with Activmedia. I investigated some of the other software available, such as PAI, the Pioneer Application Interface. This is a C++ library that is used to communicate with and control the robot. We will be using this library for our own software which will be written at a later date.
This week we are investigating more with the software. I am working on my own C++ programs and also looking at some Java server stuff for later. Also today we purchased our webcam to provide the video feedback to the user. After installing this camera we discovered that it comes with a Java applet and webserver to put video up on the web, and we hope to implemen this in our final project to cut out the Microsoft Netmeeting and Internet Information Server that we were planning on using. At the end of the day we disassembled the top plate of the robot so Tim could begin fabricating the mount for the laptop and camera.
This week Tim brought in the laptop mount and we put the robot back together. The laptop and camera mounts fit perfectly. I continued working on PAI C++ code and Tim started working with some Java code. He ended up being able to figure out how to take the webcam video and put it in our own webpage using the included software, which saves alot of time researching and setting up Microsoft Netmeeting and Internet Information Explorer.
We started implementing the Java Interface and C commands that Sean has been working on. You can check out the weekly updates by going to the actual Webbot Page.
The initial Java Interface was completed and tested from a remote location. We took a picture of the Robot as it was being driven down the hallway at Bradley University.
Sean added a feature to send back the sonar readings from the robot when a request command was sent. We are using the only four of the sonar rings at this time. This still gives the user a good idea on how far objects are away from the robot.
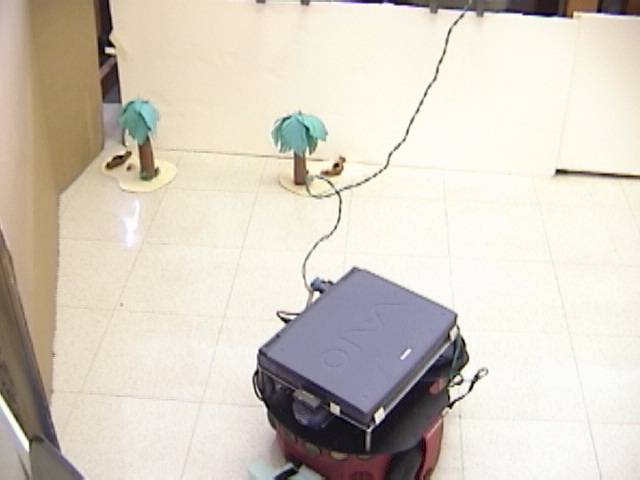
We do not currently have a recharging station built yet so Tim made up a long "extension cord" to connect the robot to the charging station. The laptop is now being run off of the robots batteries through a DC to DC converter. Everything is wireless except for the robots ability to recharge itself. Here is a picture of the robot in its current enviroment.
Tim added the sonar ring display to the Java interface and also changed the connection status around. He added a button to connect and disconnect from the robot and a status window changes to let the user know if he/she is connected to the robot or not.
This week we found out that Teveo's website is no longer in service. This was the web site we were using to broadcast the webcam's video. Our next step is use Microsoft's Netmeeting and incorporate it into the Java interface.
The slider function of the user interface is now working. The user can move the robot by just moving the slider bar.
{kind=link}
{kind=link}
{kind=link}