Implementation of Conventional and Neural Controllers Using Position and Velocity Feedback
To veiw these documents Adobe Acrobat is needed
By:Christopher Spevacekemail: MuScrat1@aol.comManfred Meissneremail: m5894@bobcat.bradley.edu
Advisor:Dr. Gary Dempseyemail: gld@cegt201.bradley.edu
 Deliverables:
Deliverables:
Confirmation Memo
Functional Description
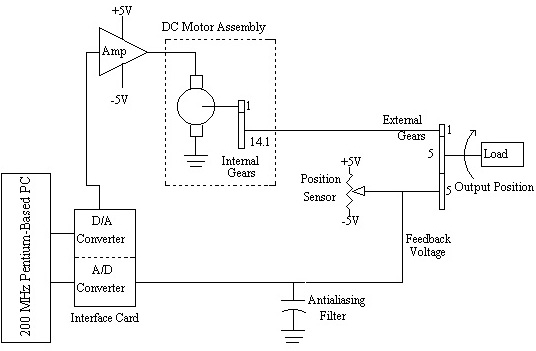
Block Diagram
Patent Search
Data Sheet
Preliminary Power Point Presentation
Preliminary Report
Project Abstract
Progress Reports
Progress Report For 1-31-2000
Progress Report For 2-06-2000
Progress Report For 2-13-2000
Progress Report For 2-20-2000
Progress Report For 2-27-2000
 Progress Report For 3-05-2000
Progress Report For 3-05-2000
Progress Report For 3-21-2000
Progress Report For 3-26-2000
Progress Report For 4-04-2000
Progress Report For 4-11-2000
Progress Report For 4-18-2000
Progress Report For 4-25-2000
Progress Presentation
Progress Presentation #1
Progress Presentation #2
Final Reports
Paper for the Research Expo
Final Paper
Final Presentation
Pictures:
Work Bench
Robot Arm
Power Amp
D/A and A/D Card
Position Sensor
Work Station
Expo 2000
Dr. Dempsey's Groups
Project Links:
Dr. Dempsey Homepage
Manufactured Robot Arm and Amplifier
Quanser Consulting Homepage
Manufactured the Computer
Gateway Computers Homepage
School Links:
Bradley University Electrical Engneering Homepage
Bradley University Homepage
Senior Projects Lists
Microcontroller Implementation of a Small Robot Arm Controller By Megan Bern and Ritesh Patel